
February 2013
Small Logo Robot
I started this project in 2006. After Christmas 2012 I felt like getting back into microcontrollers so I picked this project back up. The chassis is two rear ends from some cheap RC cars glued together. each half is only driving one wheel. The front half drives the right side and the back the left. I had originally wanted to use tracks to drive the non powered wheels but my homemade cogs and tracks didn't work out as nicely as I had hoped. They were a little loose and so they would start to fall off and jam up. So instead of tracks I glued on some pulleys smaller then the wheels and ran a couple of belts. 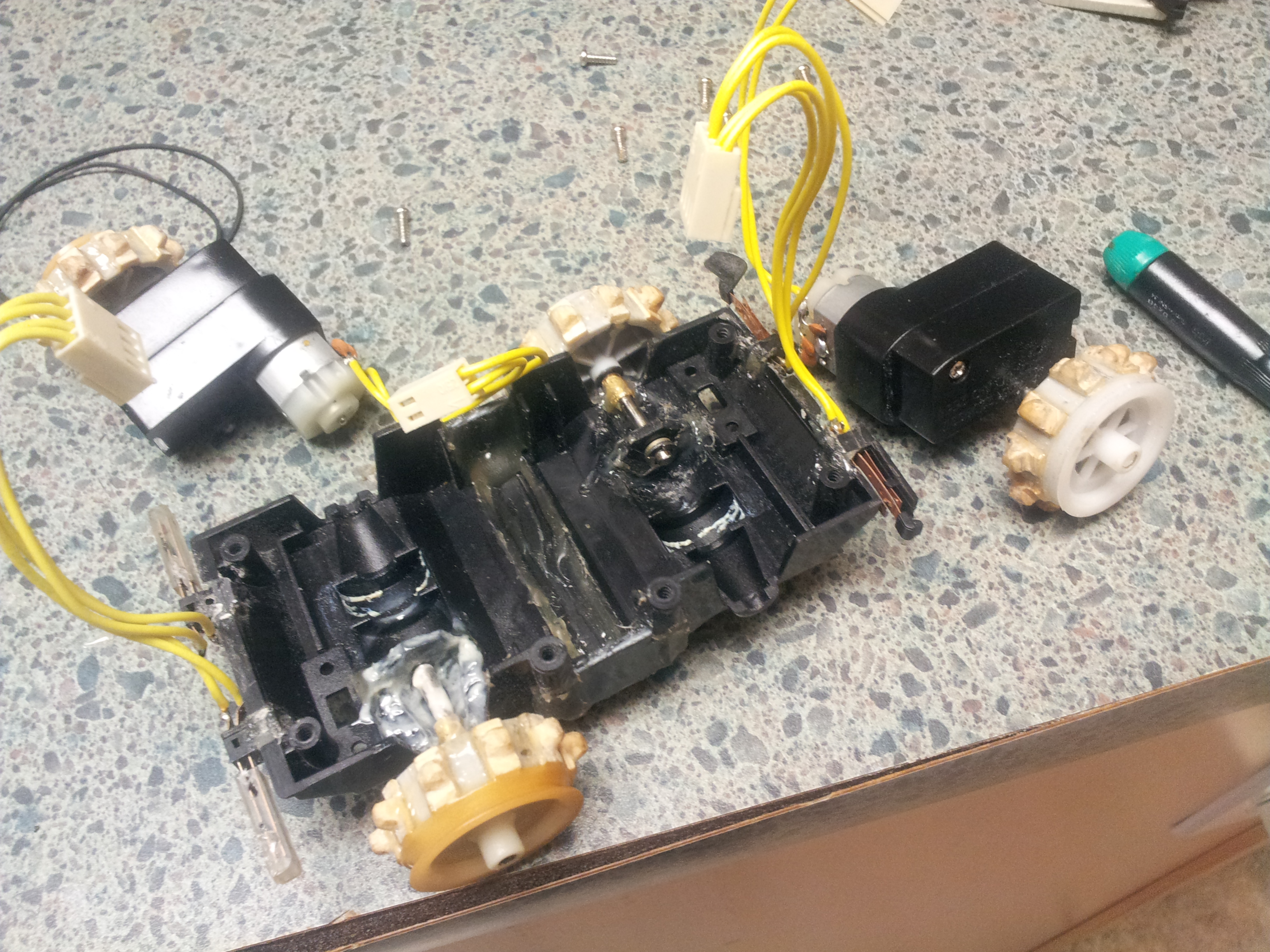 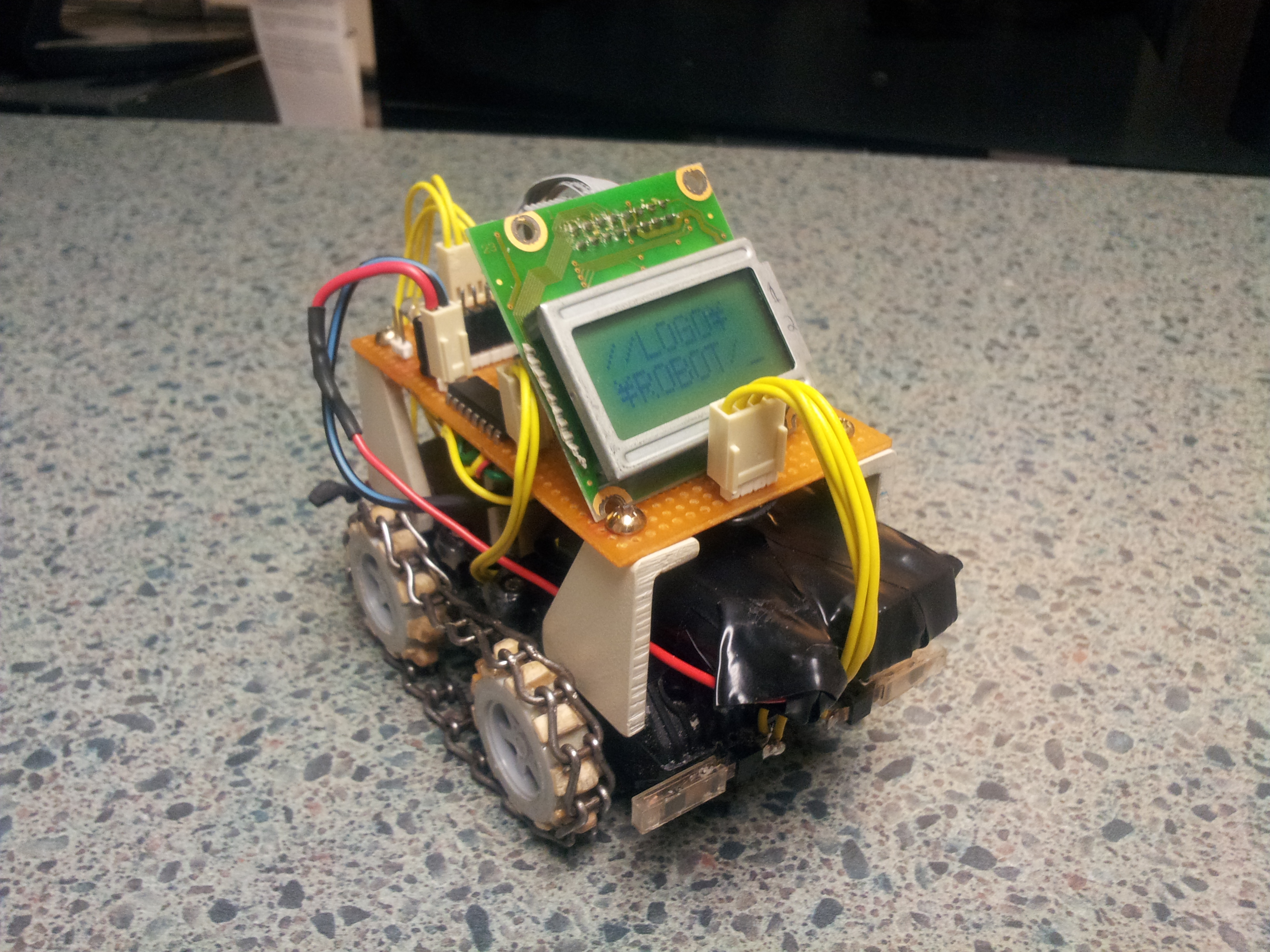
It's powered by 4 AA rechargeable batteries giving me 1.2 x 4 = 4.8VDC which works great with the LCD and PIC. I'm using a PIC16F690 to control it. The LCD is from an old fax machine or printer, I forget. Theres a couple of white LEDs on the front to act as head lights. Four micro switches are mounted to the corners to detect obstacle collisions. It's programmed as a logo robot. when you boot it up you can input up to 64 commands with the micro switches and it will execute the commands. there are 8 commands: forward, backwards, right, left, wait, lights on, lights off, and done. You can also give every command a duration from 0 to 31 units (~100ms) You can also save the commands to the EEPROM so that the next time you turn it on it will have saved you command list. There is a random command function that can be started that runs random commands until it gets a done command.
|

